
Recently, the Department of Otolaryngology, PUMCH developed its own high-fidelity and cost-effective “Nasal Sinus-Skull Base Virtual Reality Endoscopic Teaching System” (hereinafter referred to as “the teaching system”) for the nasal-skull base region. Utilizing the virtual reality (VR) technology, it provides medical students and doctors with a more intuitive and comprehensive anatomical learning and surgical training experience. The team also produced related research papers and was granted associated patents. The project was supported by the National High Level Hospital Clinical Research Funding.
The nasal sinus-skull base region is one of the most anatomically complex regions of the human body, making the learning curve very long. Traditional teaching methods based on text and two-dimensional images make it challenging for learners to develop three-dimensional thinking. In the past decade, endoscopic endonasal skull base surgery techniques have developed rapidly, necessitating new teaching methods to help students grasp complex surgical principles more quickly.
This teaching system innovatively combines “3D computer simulation technology” and “semi-physical simulation technology”, integrating functions of 3D anatomical structure teaching, 3D surgical navigation teaching, and endoscopic exploration simulation. It offers unique functional and technical advantages over similar domestic and international systems in related fields.

▲Appearance of the device used by the teaching system
What distinguishes this project from foreign ENT teaching and training products is that every part involved is “completely domestic”. Starting from scratch, it established a high-resolution and high-fidelity endoscopic basic model for the head and neck. Attention was paid to anatomically complex nasal-skull base parts such as the pterygopalatine fossa and infratemporal fossa for the first time. For these parts, the team sorted out the anatomical and surgical key points to provide clearer, more comprehensive, and in-depth anatomical learning content. By combining the virtual model with a 3D-printed physical model and adding an extension rod to the force feedback handle, it provides a highly realistic, hand-eye coordinated endoscopic exploration simulation experience.
▲System login page, endoscopic exploration simulation interface, and the nasal model
For doctors, the teaching system acts like a sharp “third eye” or “super detective”. It can perform flexible interactive simulated explorations based on manual modeling and explorations simulating surgical navigation based on high-resolution image data. For the first time in the industry, it integrates the core functions of 3D anatomical teaching and VR simulation teaching, tapping into the advantages of both for more effective teaching.
The endoscopic teaching scenario is like a miniature camera, capturing every image of the nasal sinus-skull base region in fine granularity. The system innovatively enables both global and local endoscopic explorations. The former focuses on overall navigation of anatomical structures under the endoscope, while the latter is more geared towards detailed annotations of typical local anatomical structures, enhancing students’ three-dimensional understanding through fine-grained endoscopic operation and multiple endoscopic viewing angles.
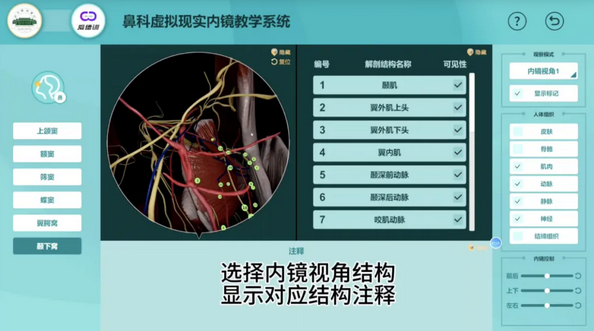
▲The menu for local explorations
“The simulation is almost like a real surgical setting”. Compared with traditional anatomical learning models and surgical training tools, this system gives students an “immersive” experience of the real nasal endoscopic operation environment. They hold the endoscope with their left hand, which can be switched between 0°, 30°, and 70° as needed; their right hand holds instruments, which can be switched between probes, suction devices, dissectors, and other surgical instruments as needed. It can also help novice students practice endoscopic operation and bi-manual coordination, improving their “endoscopic dexterity”. When the force feedback handle simulates the endoscope or instrument “touching” nasal structures such as the nasal septum or turbinates, or the endoscope and the instrument “clashing”, both hands of the student can clearly feel the resistance, mimicking their tactile sensation when performing surgery on-site.
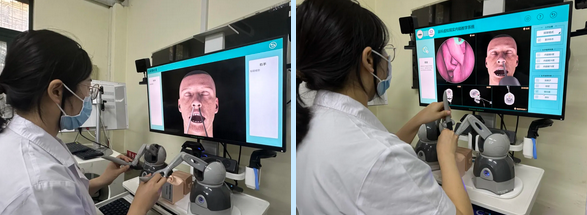
▲Left: A student was performing calibration (registration) of the virtual model with the physical model; Right: a student was performing global endoscopic exploration
Written by Aodeng Surita and Wang Jingxia
Pictures courtesy of the Department of Otolaryngology